Warner Wu 吴秉寰

Undergraduate Student at
University of California, Berkeley
Tongji University, Shanghai
"”NONLINEAR SYSTEMS — COMPLETE NOTES””
ESSENTIAL MATRIX DERIVATIVE RULES
| Matrix type | Form | Eigenvalues | Quick rule |
|---|---|---|---|
| Diagonal | diag(a, d) |
$\lambda_1=a,\ \lambda_2=d$ | Read off diagonal directly |
| Upper triangular | $\begin{bmatrix} a & b \\ 0 & d \end{bmatrix}$ | $\lambda_1=a,\ \lambda_2=d$ | Read off diagonal, ignore $b$ |
| Lower triangular | $\begin{bmatrix} a & 0 \\ c & d \end{bmatrix}$ | $\lambda_1=a,\ \lambda_2=d$ | Read off diagonal, ignore $c$ |
| Anti-diagonal | $\begin{bmatrix} 0 & b \\ c & 0 \end{bmatrix}$ | $\lambda=\pm\sqrt{bc}$ | $bc>0$: real saddle; $bc<0$: imaginary center |
| General $2\times2$ | $\begin{bmatrix} a & b \\ c & d \end{bmatrix}$ | $\lambda^2-\text{tr}\,\lambda+\det=0$ | Use trace & determinant |
| Diagonal/Triangular $3\times3$ | $\begin{bmatrix} a & * & * \\ 0 & d & * \\ 0 & 0 & f \end{bmatrix}$ | $\lambda_1=a,\ \lambda_2=d,\ \lambda_3=f$ | Read off diagonal directly |
| Anti-diagonal $3\times3$ | $\begin{bmatrix} 0 & 0 & c \\ 0 & d & 0 \\ e & 0 & 0 \end{bmatrix}$ | $\lambda_1=d,\ \lambda_{2,3}=\pm\sqrt{ce}$ | Middle entry gives one $\lambda$; corner pair interact |
INVERSE OF A $2\times2$ MATRIX
For
\[A=\begin{bmatrix} a & b \\ c & d \end{bmatrix},\qquad \det A = ad-bc,\]the inverse exists iff $\det A\neq 0$, and is given by
\[A^{-1}=\frac{1}{ad-bc}\begin{bmatrix} d & -b \\ -c & a \end{bmatrix}.\]Quick rule: swap the diagonal entries ($a\leftrightarrow d$), negate the off-diagonal entries ($b\to -b$, $c\to -c$), then divide by $\det A$.
Sanity check: $AA^{-1}=I$.
1.Derivative of a Transpose
Let $X = X(t)$.
\[\frac{d}{dt}(X^\top) = \left(\frac{dX}{dt}\right)^\top\]2.Matrix Product Rule
\[\frac{d}{dt}(XY) = \dot X Y + X \dot Y\]3.Quadratic Form
Let
\[V(x) = x^\top A x\]Then
\[\nabla V(x) = (A + A^\top)x\]If $A = A^\top$,
\[\nabla V(x) = 2Ax\]4.Chain Rule (Lyapunov Use)
For
\[\dot x = f(x)\] \[\dot V(x) = \nabla V(x)^\top f(x)\]1. Linear Systems
A linear time-invariant system:
System:
\[\dot{x} = A x\]Solution:
\[x(t) = e^{At} x(0)\]The stability of the system is determined by the eigenvalues $\lambda_i$ of $A$.
-
$\operatorname{Re}(\lambda_i) < 0$ for all $i$ $\Rightarrow$ asymptotically stable
-
$\operatorname{Re}(\lambda_i) > 0$ for some $i$ $\Rightarrow$ unstable
-
$\operatorname{Re}(\lambda_i) = 0$ for some $i$
- if the eigenvalues on the imaginary axis are simple $\Rightarrow$ Lyapunov stable
- otherwise $\Rightarrow$ unstable
Properties of linear systems:
- Superposition principle holds
- The equilibrium is typically unique: $x = 0$
- No limit cycles exist
- The global behavior is completely determined by the spectrum of $A$
1.1 limit cycle
A limit cycle is an isolated periodic orbit of a nonlinear autonomous system
\[\dot{x} = f(x)\]A trajectory $\gamma $ is a limit cycle if
- it is periodic $\text{i.e. if there exists some } t_0 > 0 \text{ such that } x(t + t_0) = x(t) \text{ for all } t \in \mathbb{R}.$
- there are no other periodic orbits arbitrarily close to it
Nearby trajectories may approach the orbit (stable), move away from it (unstable), or approach from one side only (semi-stable).
Limit cycles do not occur in linear systems.
Example
Consider the system in polar coordinates
\[\dot R = -R(R^2-1), \qquad \dot \theta = 1\]Radial equilibria satisfy
\[\dot R = 0 \Rightarrow R = 0,\; R = 1\]For $0<R<1$, $\dot R > 0 $ so the radius increases.
For $R>1$, $ \dot R < 0 $ so the radius decreases.
Thus trajectories move toward R=1 while $\theta $ keeps rotating.
The circle
\[R = 1\]is therefore a stable limit cycle. you can have unstable one too if you like
2. Nonlinear Systems
General nonlinear autonomous system:
\[\dot{x} = f(x)\]Equilibria satisfy:
\[f(x_e) = 0\]Nonlinear systems may exhibit:
- Multiple equilibria
- Limit cycles
- Bifurcations
- Finite escape time
- Complex attractors
Superposition does not hold:
\[f(x_1 + x_2) \neq f(x_1) + f(x_2)\]Behavior depends on geometry of the vector field.
3. Normed Spaces
A norm satisfies:
- $\Vert x\Vert \ge 0$, and $\Vert x\Vert =0 \iff x=0$
- $\vert\alpha x\vert = \vert\alpha\vert\vert x\vert$
- $\Vert x+y\Vert \le \Vert x\Vert +\Vert y\Vert $
Common norms in $\mathbb{R}^n$:
\(\Vert x\Vert _2 = \sqrt{x^\top x}, \quad\) \(\Vert x\Vert _1 = \sum |x_i|, \quad\) \(\Vert x\Vert _\infty = \max_i |x_i|\)
All norms are equivalent in finite dimensions.
4. Completeness
A sequence converges if:
\[\Vert x_n - x\Vert \to 0\](in strict definition: every ε>0, there exists an integer N such that for all n≥N the above <ε)
A sequence is Cauchy if:
\[\Vert x_n - x_m\Vert \to 0 \quad \text{as } n,m \to \infty\]A space is complete if every Cauchy sequence converges in that space.
actually in $\mathbb{R}$ , every cauthy seq is converged.
A complete normed space is called a Banach space.
Completeness is required for fixed-point theorems.
5. Contraction Mapping
A mapping $P$ is a contraction if:
\[\Vert P(x)-P(y)\Vert \le L \Vert x-y\Vert , \quad 0 \le L < 1\]Banach Fixed-Point Theorem
If $P$ is a contraction on a complete space:
- A unique fixed point exists
- x is cauthy and iteration converges to fixed point $x^*$
the P mapping could map the whole function to another function, so that the range contract (see homework)
6. Integral Form of ODE
Given:
\[\dot{x} = f(t,x), \quad x(t_0)=x_0\]Integral form:
\[x(t)=x_0+\int_{t_0}^{t} f(s,x(s))\,ds\]Define operator:
\[(Px)(t)=x_0+\int_{t_0}^{t} f(s,x(s))\,ds\]Solving the ODE is equivalent to solving:
\[Px = x\]Thus the ODE becomes a fixed-point problem.
7. Lipschitz Continuity
Global Lipschitz:
\[\Vert f(x)-f(y)\Vert \le L \Vert x-y\Vert\]Local Lipschitz guarantees local existence and uniqueness.(with p.w. continuity)
piecewise continuity looks like not continued
Global Lipschitz guarantees global existence (the condition for no finite escape time).
how to find: take the derivative of f(x)
- you can actually take the derivative of the linear system, then the answer is the lipschitz constant
- lipschitz continuity $\rightarrow $ continuity
8. Finite Escape Time
Example:
\[\dot{x} = 1 + x^2\]Solution:
\[x(t)=\tan t\]Blow-up occurs at:
\[t=\frac{\pi}{2}\]Conclusion:
- Local Lipschitz ⇒ local solution
- Global growth control ⇒ global solution
linear system does not have a finite escape time because the derivatives always a constant, so it is globally lipschitz $\rightarrow$ no finite escape time
9. Grönwall Inequality
If
\[u(t) \le C + \int_{t_0}^{t} a(s) u(s)\,ds\]Then
\[u(t) \le C \exp\!\left(\int_{t_0}^{t} a(s)\,ds\right)\]Used for:
- Continuous dependence on IC
- Growth bounds
10. Continuous Dependence on IC (Initial Conditions)
Four questions for nonlinear system:
- solution exist?
- solution unique?
- have finite escape time?
- continuous on IC?
Consider
\[\dot{x} = f(t,x), \quad x(t_0)=x_0\]Assume:
- $f$ is continuous in $t$
- $f$ is locally Lipschitz in $x$
Then solutions depend continuously on the initial condition.
More precisely:
For $\forall$ $T>t_0$ and $\forall$ $\varepsilon>0$, there $\exists$ $\delta>0$ such that
\[\Vert x_0 - y_0\Vert < \delta \Rightarrow \sup_{t \in [t_0,T]} \Vert x(t,x_0) - x(t,y_0)\Vert < \varepsilon\]This means small perturbations in the initial condition produce small changes in the entire trajectory over finite time intervals.
"”STABILITY THEORY””
11. Equilibrium
\[f(x_e)=0\]12. Compactness
Close + bounded = compact
Example: [0,1]
13. Lyapunov Stability
Stable if:
For $\forall$ $\varepsilon>0$, there $\exists$ $\delta>0$ such that
\[\Vert x(0)-x_e\Vert <\delta \Rightarrow \Vert x(t)-x_e\Vert <\varepsilon\](Note: $t$ means any time $t \ge 0$, not $t \to \infty$)
Asymptotically stable if, first satisfied SISL, additionally:
\[\exists \delta > 0 \text{ s.t. } \|x_0\| < \delta \Rightarrow \|x(t, x_0)\| \to 0 \text{ as } t \to \infty\]14. Lyapunov Direct Method
A scalar function $V(x)$ ( Lyapunov function )satisfies:
- $V(x)>0$ for $x\neq 0$
- $V(0)=0$
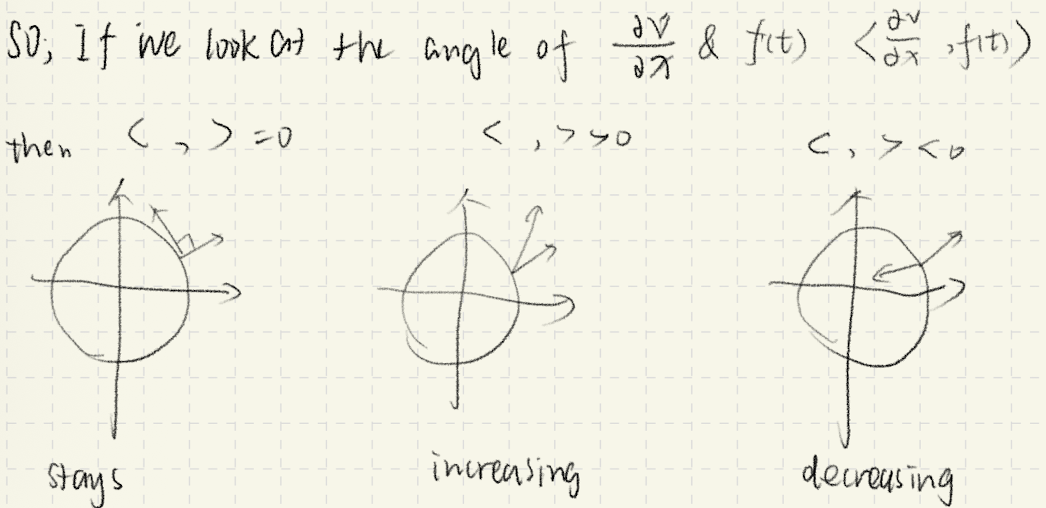
Derivative along trajectories:(basically $\dot x = f(x)$)
\[\dot{V}(x)=\nabla V(x)^\top f(x)\]If
\[\dot{V}(x)\le 0\]→ Stable.
If
\[\dot{V}(x)<0\]→ Asymptotically stable.
intuition:
15. Global AS and LaSalle Theorem
If:
- $V(x)>0$
- $\dot{V}(x)\le 0$
- $V(x)\to \infty$
as $x \to \infty$ (radially unbounded)
Then we say it is globally AS (remember the picture Prof draw in class)
LaSalle Thm preset
- SISL
- let $\mathcal{S}’= {x\in D \mid \dot V(x)=0 } $, if the only solution of the system dynamics within S is x(t)=$x_e$ = 0
then $x_e$ is AS
S is invariance set, in set S the $\dot{V} =0$, the other region in D is $\dot{V} <0$
this basically says the point will fall downward and fix only to the origin
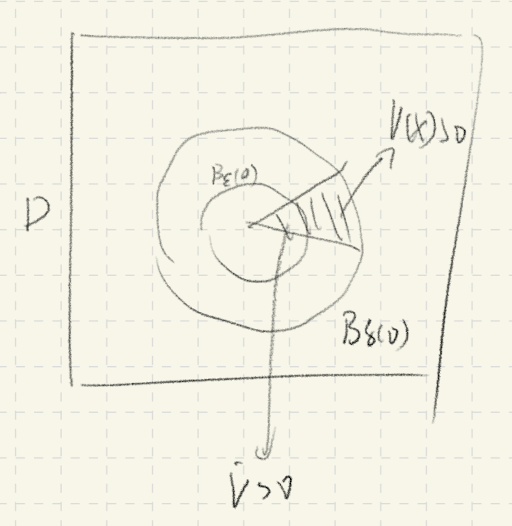
16. Instability Theorem (Chetaev)
If:
- $V(0)=0$
- $V(x)>0$
- $\dot{V}(x)>0$ in a wedged region
or say:
in some point in the $B_\delta(X_e) $ $V(x)>0$,
and $\exists \varepsilon$ s.t. all $\dot{V}(x)$ >0 in this { $B_\epsilon(X_e)$ $\vert$ $V(x)>0$ }
Then equilibrium is unstable.
17. Lyapunov Equation
For the linearized system \(\dot{x} = A(x - x_e),\)
consider the quadratic Lyapunov function
\[V(x) = (x - x_e)^{\top} P (x - x_e),\]where $P = P^{\top} > 0$.
The matrix $P$ satisfies the Lyapunov equation
\[A^{\top} P + P A = -Q,\]where $Q = Q^{\top} > 0$. You can just assign $I$
If such a positive definite $P$ exists, then the equilibrium $x_e$ is locally asymptotically stable.
because the Lyapunov Equation makes
\[\dot{V} (x)= (x - x_e)^{\top} Q (x - x_e)<0\]18. Linearization
Linearization matrix:
\[A = \frac{\partial f}{\partial x}\Big|_{x_e}\]Approximation:
\[\dot{x} \approx A(x-x_e)\]Linearization Example (Equilibrium Not at Origin)
Consider the nonlinear system
\[\begin{cases} \dot x_1 = x_2 \\ \dot x_2 = -x_1 + 1 - (x_1 - 1)^3 \end{cases}\]1. Equilibrium
Solve
\[x_2 = 0, \quad -x_1 + 1 - (x_1 - 1)^3 = 0\]We obtain
\[x_e = (1,0).\]2. Jacobian
Let
\[f_1 = x_2, \quad f_2 = -x_1 + 1 - (x_1 - 1)^3.\]Then
\[A(x) = \begin{bmatrix} 0 & 1 \\ -1 - 3(x_1 - 1)^2 & 0 \end{bmatrix}.\]Evaluate at $x_e = (1,0) $:
\[J(x) = \begin{bmatrix} 0 & 1 \\ -1 & 0 \end{bmatrix}.\]3. Linearized System
Define shifted state $(x-x_e)$
\[\tilde x = \begin{bmatrix} x_1 - 1 \\ x_2 \end{bmatrix}.\]Then the linear approximation is
\[\dot{\tilde x} = \begin{bmatrix} 0 & 1 \\ -1 & 0 \end{bmatrix} \tilde x.\]19. Lyapunov Indirect Method
After linearization,
If eigenvalues of $J(x)$:
- $\forall$ Re(λ)<0 → locally asymptotically stable
- $\exists$ Re(λ)>0 → unstable
- $\exists$ Re(λ)=0 → inconclusive (cannot say SISL) (if the linear system neither grows nor decays → higher-order nonlinear terms decide, so the test is inconclusive.)
Indirect method is local.
20. Region of Attraction (ROA)
Defined as:
\[\mathcal{R} = \{x_0 : \lim_{t\to\infty} x(t,x_0)=0\}\]Exact ROA is difficult to compute.
Using quadratic Lyapunov function:
\[V(x)=x^\top P x\]sublevel set:
\[x^\top P x \le c\]provides an inner estimate of ROA.
- first V(x)is a lyapunov function
- find biggest c s.t. $\dot{V} <0$ (for nonlinear you first linearize it, and then finding open ball for x in the case of nonlinear one, then calculate c base on your open ball x?)
look at home work
yes, and then calculate c using the following inequation
Formular:
$\because \lambda_{min} X^TX \le X^TPX \le \lambda_{max}X^TX $ and $x^\top P x \le c$
$\therefore $ \(\lambda_{\min} \Vert x_{max} \Vert^2 \le c \;\Rightarrow\; \Vert x_{max} \Vert \le \sqrt{\frac{c}{\lambda_{\min}}}\)
and
$\lambda_{\max} \Vert x_{min} \Vert^2 \le c \;\Rightarrow\; \Vert x_{min} \Vert \le \sqrt{\frac{c}{\lambda_{\max}}}$
"”Time-Varying System””
21. Stability of Time-Varying System
1.Time-Varying Systems
System: \(\dot{x} = f(t,x)\)
Equilibrium point: \(\dot{x}\big|_{x_e} = 0 \;\Longleftrightarrow\; f(t,x_e)=0, \quad \forall t \ge t_0\)
Region of Attraction (ROA): may depend on time (t), and can shrink.
2.Stability Definitions (Time-Varying)
- 1.Stability (SISL):
- 2.Uniform stability:
(note: $\delta$ does not depend on $t_0$)
Otherwise: unstable.
- 3.Asymptotic stability:
- 4.Uniform asymptotic stability:
independent of $t_0$
- 5.Global uniform asymptotic stability: \(\Vert x(t)\Vert \to 0 \quad \text{as } t \to \infty\)
Notes:
-
difference between uniform and normal one is the dependance of $t_0$
For normal (SISL) stability: \(\forall \varepsilon>0,\;\exists \delta(\varepsilon,t_0)>0\) Here $\delta$ depends on $t_0$, so the system can behave differently if you start later. This is weaker.
For uniform stability: \(\forall \varepsilon>0,\;\exists \delta(\varepsilon)>0\) Here $\delta$ is independent of $t_0$, so the same bound works for all starting times. This is stronger.
22. Class-$\mathcal{K}$ Functions
we introduce this to solve previous lyapunov conditions not working problems
1.class-$\mathcal{K}$
A function $\alpha:[0,a)\to[0,\infty)$ is class-$\mathcal{K}$ if:
- Continuous
- Strictly increasing
- $\alpha(0)=0$
2.locally positive definite
A function \(V : [0,\infty) \times \mathbb{R}^n \to \mathbb{R}\) is locally positive definite if
-
$V(t,0) = 0, \quad V(t,x) > 0 \;\; \forall x \ne 0,\; \forall t \ge 0$
-
there exists ( r > 0 ) and a class-$\mathcal{K}$ function $ \alpha : [0,r) \to [0,\infty) $
such that
\[V(t,x) \ge \alpha(\Vert x \Vert), \quad \forall t \ge 0,\; \forall x \in B_r(0)\]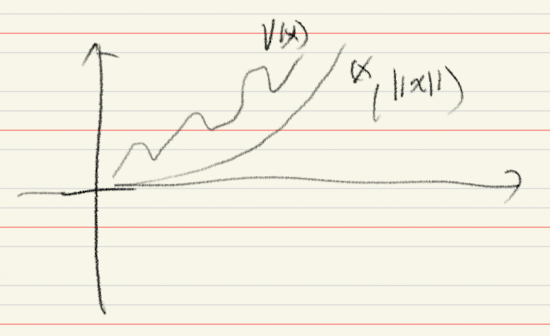
3.decrescent
A continuous function
\[V : [0,\infty) \times \mathbb{R}^n \to \mathbb{R}\]is decrescent if there exists $ \delta > 0 $ and a class-$\mathcal{K}$ function
\[\gamma : [0,\infty) \to [0,\infty)\]such that
\[V(t,x) \le \gamma(\Vert x \Vert), \quad \forall t \ge 0,\; \forall x \in B_\delta(0)\]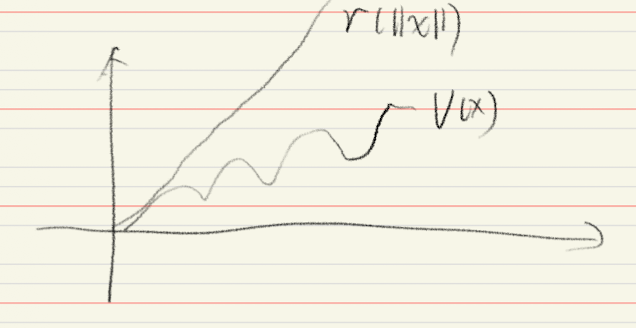
23. Lyapunov Conditions (Time-Varying)
(TFAE — The following are equivalent)
-
$V(t,x)$ is locally positive definite
-
$\exists\; W(x)$ locally positive definite such that
- define
Consider the system
\[\dot{x} = f(t,x), \quad x(t_0)=x_0, \quad f(t,0)=0,\; \forall t \ge 0\]Assume $f$ is locally Lipschitz in $x$ and piecewise continuous in $t$
1) Stability in the sense of Lyapunov (local)
If there exists a function (V(t,x)) such that:
-
local Positive definite: \(\alpha_1(\|x\|) \le V(t,x)\)
-
Non-increasing along trajectories: \(\dot V = \frac{\partial V}{\partial t} + \frac{\partial V}{\partial x} f(t,x) \le 0\)
then the equilibrium is locally Lyapunov stable.
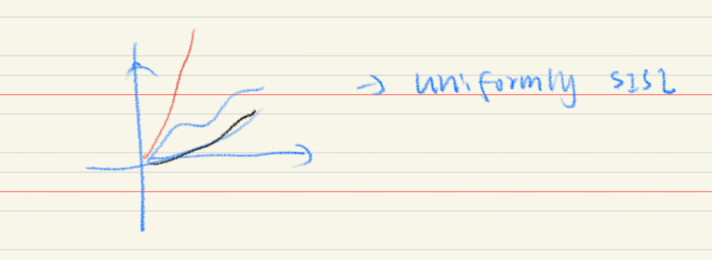
2) Uniform Stability (Uniform SISL, local)
If in addition:
- V is decrescent (upper bound independent of (t))
then the system is locally uniformly stable.
3) Asymptotic stability (non-uniform, local)
-
local Positive definite: \(\alpha_1(\|x\|) \le V(t,x)\)
-
$\dot{V}$ decreases along trajectories: \(\dot V = \frac{\partial V}{\partial t} + \frac{\partial V}{\partial x} f(t,x) < 0\)
-
Note: convergence may depend on initial time (t_0).
4) Uniform asymptotic stability (UAS, local)
To get uniformity (independent of initial time), require:
- V decrescent
Then the system is locally uniformly asymptotically stable.
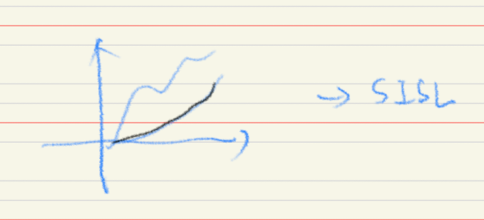
blue line is the trajectory.
24. Exponential Stability
1.ES
Equilibrium is exponentially stable if:
\[\Vert x(t)\Vert \le M e^{-\lambda t} \Vert x_0\Vert\]for some $M>0$, $\lambda>0$.
2.Lyapunov condition(direct method):
- If $c_1 \Vert x\Vert^2 \le V(x) \le c_2 \Vert x\Vert^2$ and $\dot{V}(x) \le -c_3 V(x)$, then exponentially stable.
3.Indirect Method (Linearization):
- If $ A = \frac{\partial f}{\partial x}\Big|_{x=0} $ and all eigenvalues of $A$ satisfy $ \text{Re}(\lambda_i) < 0 $
then $x_e = 0$ is exponentially stable.
4.hierachy
\[\text{Exponential Stability} \Rightarrow \text{Asymptotic Stability} \Rightarrow \text{Stability}\]Example: $\dot{x} = -x^3$ is asymptotically stable but NOT exponentially stable.
5.example of ES Example:
-
System \(\dot{x} = -x^3\) is globally asymptotically stable (GAS), but convergence is slow (polynomial).
-
Add a small perturbation \(\dot{x} = -x^3 + \varepsilon x\)
-
Near $x=0$: \(\dot{x} \approx \varepsilon x\) so the system becomes unstable.
Conclusion:
- asymptotic stability can be destroyed by arbitrarily small perturbations
- exponential stability is robust to small perturbations
Fix (via linearization):
- design the system such that the linearization \(A = \frac{\partial f}{\partial x}\Big|_{x=0}\) has eigenvalues satisfying \(\text{Re}(\lambda_i) < 0\)
So:
-
add a linear stabilizing term \(\dot{x} = -x - x^3\)
-
then near $x=0$, system behaves like \(\dot{x} \approx -x\)
-
so eigenvalue $\lambda = -1 < 0$ → ensures exponential stability and robustness
25. Linearization & Eigenvalue Test
Linearize system at equilibrium:
\[A = \frac{\partial f}{\partial x}\Big|_{x=0}\]Stability determined by eigenvalues of $A$:
- All $\text{Re}(\lambda) < 0$ → locally asymptotically stable (actually ES)
- Any $\text{Re}(\lambda) > 0$ → unstable
- $\text{Re}(\lambda) = 0$ → inconclusive (higher-order terms decide)
"”Control Method””
26. Control Lyapunov Function CLF
insight: How to control a system, makes it GAS
A lyapunov function $V(x)$ is a CLF if: \(V(x) > 0,\quad V(0)=0\)
and there exists control $u$ such that: \(\inf_{u} \frac{\partial V}{\partial x} f(x,u) < 0,\quad \forall x \ne 0\)
which is literally $\dot{V}(x)<0 $
Design: Choose $V(x)$ and design $u(x)$ to enforce $\dot{V}(x) < 0$.
27. Artstein Theorem (1983)
Consider: \(\dot{x} = f(x,u)\)
If:
- $f$ is Lipschitz
- there exists a CLF
then:
\[\exists \alpha(x) \in C^\infty\]such that: \(\dot{x} = f(x,\alpha(x))\)
is GAS
only existence, not construction
28. Control Affine System
\[\dot{x} = f(x) + \sum_{i=1}^m g_i(x) u_i\]or
\[\dot{x} = f(x) + g(x)u\]and
\[y = h(x)\]affine = linear + shift
29. Lie Derivative
\[L_f h(x) = \frac{\partial h}{\partial x} f(x)\]For CLF: \(\dot{V}(x) = L_f V(x) + \sum L_{g_i} V(x) u_i\)
30. Key CLF Condition
\[\forall x \ne 0,\quad \inf_u \big[ L_f V(x) + L_g V(x) u \big] < 0\]equivalent:
\[L_g V(x) = 0 \;\Rightarrow\; L_f V(x) < 0\]if control cannot act, system must decay itself
31. Constructing Control
Goal: find $u = \alpha(x)$
\[u = \begin{cases} 0, & L_g V(x)=0 \\ -\dfrac{L_f V}{L_g V}, & L_g V(x)\ne 0 \end{cases}\]min-norm controller
32. Small Control Property
A CLF satisfies:
\[\forall \epsilon>0,\ \exists \delta>0,\ \forall x\in B_\delta(0), x\ne0,\] \[\exists u,\ \Vert u\Vert < \epsilon\]such that: \(\dot V(x) < 0\)
33. Sontag Control (GAS)
For: \(\dot{x} = f(x) + g(x)u\)
define: \(u_s(x) = \begin{cases} \dfrac{-L_f V + \sqrt{(L_f V)^2 + (L_g V)^4}}{L_g V}, & L_g V \ne 0 \\ 0, & \text{otherwise} \end{cases}\)
then: \(\dot V(x) = -\sqrt{(L_f V)^2 + (L_g V)^4} < 0\)
this input is contructed to ensures GAS
34. CLF vs Lyapunov
Lyapunov: \(\dot{x} = f(x),\quad \dot V < 0\)
CLF: \(\dot{x} = f(x)+g(x)u,\quad \exists u:\dot V<0\)
stability is not given, but achievable
35. Backstepping (idea)
stabilize system layer by layer
Introduce virtual control: \(\dot{x} = f(x) + g(x)\xi,\quad \xi = u\)
this is usually use when
- actural u does not appear in the first equation, which means the first line is not directly controllable
such as
 and
and
36. Backstepping Example
1.Backstepping Example (linear)
\[\begin{bmatrix} \dot{x}_1 \\ \dot{x}_2 \end{bmatrix} = \begin{bmatrix} 0 & 1 \\ - c_1 & -c_2 \end{bmatrix} \begin{bmatrix} x_1 \\ x_2 \end{bmatrix}\]first write as this:
\[\dot{x}_1 = x_2, \qquad \dot{x}_2 = -c_1 x_1 - c_2 x_2\]Choose virtual control:
\[x_2 = \alpha(x_1) = -c_1 x_1\]2.Error Definition
\[z = x_2 - \alpha(x_1)\]Then:
\[\dot{x}_1 = z - c_1 x_1\] \[\dot{z} = u + c_1(z - c_1 x_1)\]3.Augmented Lyapunov
\[V_a(x,z) = \frac{1}{2}x_1^2 + \frac{1}{2}z^2\] \[\dot V_a = x_1\dot x_1 + z\dot z\]Choose:
\[u = -x_1 - c_1(z - c_1 x_1) - c_2 z\] \[\Rightarrow \dot V_a < 0\]4.Backstepping General Result
If:
- $V(x)$ positive definite
- radially unbounded
and
\[L_f V + L_g V \alpha(x) \le -W(x)\]with $W(x)$ positive definite
then:
\[\text{closed-loop is GAS}\]5.Integrator Backstepping Lemma
Augmented system:
\[\dot{x} = f(x) + g(x)\xi\] \[\dot{\xi} = u\]Lyapunov:
\[V_a(x,\xi) = V(x) + \frac{1}{2}(\xi - \alpha(x))^2\]6.Control Law (Backstepping)
\[u = - c(\xi - \alpha(x)) + \frac{\partial \alpha}{\partial x}(f(x)+g(x)\xi) - \frac{\partial V}{\partial x} g(x)\]7.Weak Case (semi-definite)
If $W(x)$ is only positive semi-definite:
\[\dot V_a \le 0\]then system converges to:
\[\mathcal{Z} = \{(x,\xi)\mid W(x)=0,\ \xi=\alpha(x)\}\]not necessarily origin
37. Backstepping Revisit
Consider system:
\[\dot x = x \xi,\quad \dot \xi = u\]Choose Lyapunov:
\[V(x) = \frac{1}{2}x^2\]Let CLF:
\[V_a(x) = V(x) + \frac{1}{2}\xi^2\]Then:
\[\dot V_a = x\dot x + \xi \dot \xi = \xi (x^2 + u)\]Choose:
\[u = -x^2 - c\xi\]Then:
\[\dot V_a = -c\xi^2 \le 0\]Using LaSalle:
Invariant set:
\[S = \{(x,\xi)\mid \dot V_a = 0\} \Rightarrow \xi = 0\]Then:
\[\dot \xi = u = -x^2\]So:
\[\xi = 0 \Rightarrow x = 0\]Only solution:
\[(x,\xi) = (0,0)\]Therefore:
asymptotically stable
38. Strict Feedback System
Definition:
\[\dot x = f_0(x) + g_0(x)\xi_1\] \[\dot \xi_1 = f_1(x,\xi_1) + g_1(x,\xi_1)\xi_2\] \[\dot \xi_2 = f_2(x,\xi_1,\xi_2) + g_2(x,\xi_1,\xi_2)\xi_3\] \[\cdots\]Assume:
\[f_i(0)=0\]this is also backstepping
Each $\xi_i$ is a virtual control input
Goal:
make whole system GAS by ensuring $\dot V < 0$
39. Assumption A1
There exist:
\[\alpha(x),\; V(x)\]such that:
\[\dot x = f_0(x) + g_0(x)\alpha(x)\]is GAS (or SLS)
40. Backstepping Construction
Step 1:
\[\xi_1 = \alpha(x),\quad V_1(x)\]Step 2:
\[\xi_2 = \alpha_1(x,\xi_1)\] \[V_2 = V_1(x) + \frac{1}{2}(\xi_1 - \alpha(x))^2\]Step 3:
\[\xi_3 = \alpha_2(x,\xi_1,\xi_2)\] \[V_3 = V_2 + \frac{1}{2}(\xi_2 - \alpha_1)^2\]General derivative:
\[\dot V_2 = \frac{\partial V_2}{\partial x}\dot x + \frac{\partial V_2}{\partial \xi_1}\dot \xi_1 + \frac{\partial V_2}{\partial \xi_2}\dot \xi_2\]41. Sliding Mode Control (idea)
1.A simple system to discuss
System takes the form of:
\[\ddot y = -k y\]Choose:
\[k = \pm 1\]Goal:
\[y \to 0\]Control:
$k$ switches between $\pm 1$
2.discussion of k=$\pm 1$
first, transform to State-space:
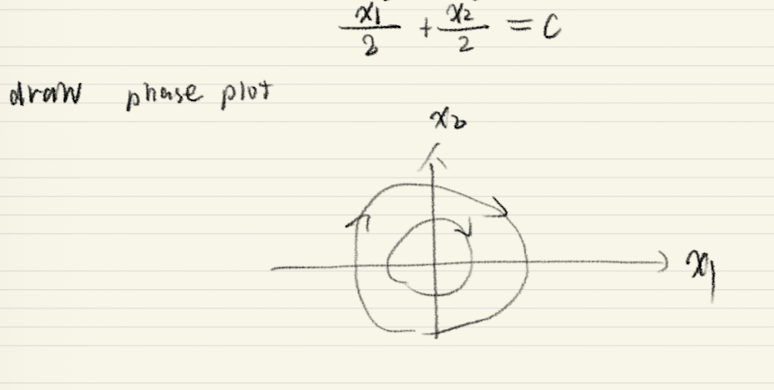
\[\dot x_1 = x_2\] \[\dot x_2 = -k x_1\]For $k=1$: \(\frac{dx_1}{dx_2} = -\frac{x_2}{x_1}\)
Integrate: \(x_1 dx_1 + x_2 dx_2 = 0\)
\[\frac{x_1^2}{2} + \frac{x_2^2}{2} = C\]circular trajectories (stable)
For $k=-1$: \(\frac{x_1^2}{2} - \frac{x_2^2}{2} = C\)
hyperbola (unstable)
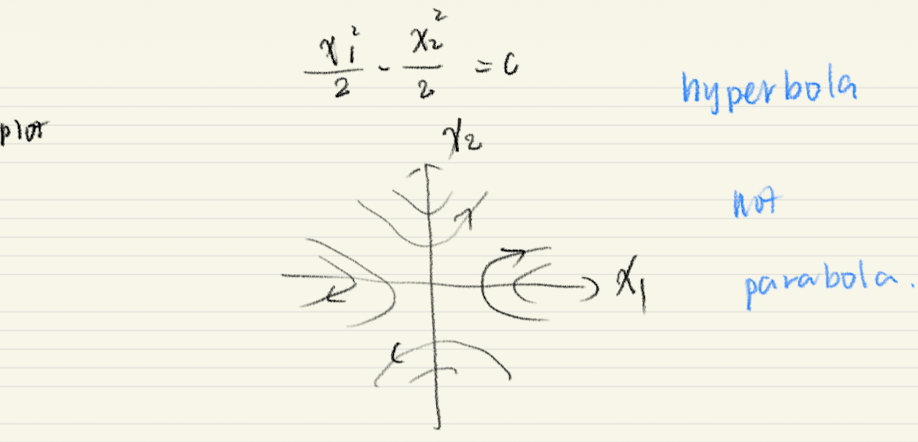
Conclusion:
switching needed
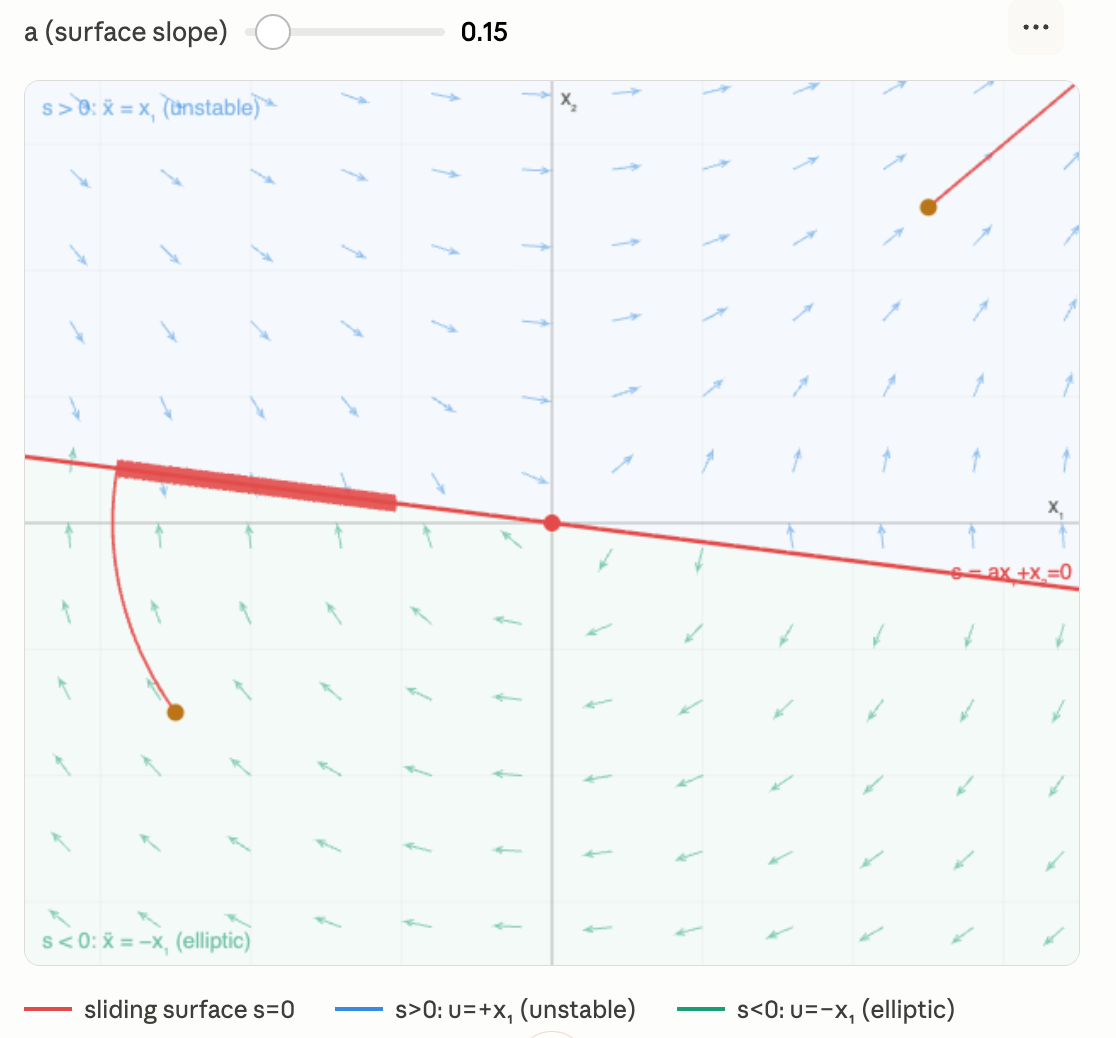
3.Sliding Surface
this surface is a surface because of the problem formation $\dot x_1 = x_2 $
Define:
\[s = a x_1 + x_2,\quad a>0\]On surface $s=0$:
\[x_2 = -a x_1\]Then:
\[\dot x_1 = -a x_1\]So: \(x_1 \to 0,\quad x_2 \to 0\)
asymptotically stable on surface
General case for Sliding Mode Control
More General Example of Sliding Mode Control
2nd order system
\[\dot{x}_1 = x_2\] \[\dot{x}_2 = h(x) + g(x)u\]if it is not this form, transform it first
$h$ and $g$ are unknown, but satisfied:
\[g(x) > g_0 > 0, \quad \forall x \in \mathbb{R}^2\]Problem Statements
Design $u(x)$, s.t. $x = \begin{bmatrix} 0 \ 0 \end{bmatrix}$ is AS.
We do this by sliding mode control.
- step 1: choosing sliding surface
Assume:
\[\left|\frac{a x_2 + h(x)}{g(x)}\right| \le \delta(x),\quad \delta(x)>0 \tag{1}\]- step 2: Choose Lyapunov functon to ensure AS:
Pick Lyapunov function:
\[V(s) = \frac{1}{2}s^2\]Then:
\[\dot{V} = s\dot{s} = s \cdot g(x) \cdot \frac{ax_2 + h(x)}{g(x)} + sg(x)u\] \[\leq g(x)|s| \cdot \delta(x) + sg(x)u\]Choose:
\[u = -\beta(x)\,\text{sign}(x) \tag{2}\]where:
\[\beta(x) \geq \beta_0 + \delta(x), \quad \beta_0 > 0\]So:
\[\dot{V} \leq -g(x)\beta_0|s| \leq 0\]Now we prove A.S. as long as the Assumption holds. Because we can choose a, so the assumption Equation (1) will hold.
Result
- reaching mode: finite-time convergence to $s=0$
- sliding surface: asymptotic convergence to origin
Conclusion
- reaching phase: finite time
- sliding phase: infinite time to $(0,0)$
Robustness
Control is robust to: \(h(x),\; g(x)\)
as long as assumption holds
42. Feedback Linearization
- Motivation: General Problem
Consider a pendulum nonlinear system:
\[\dot{x_1} = x_2\] \[\dot{x}_2 = -a\sin x_1 - b x_2 + c u\]Question: Can we design $u = u(x, v)$ to convert this into a linear system?
This is the idea behind feedback linearization.
2.def
If a system can be written as:
\[\dot{x} = A x + B r(x)[u - \alpha(x)]\]Then we can choose:
\[u = \alpha(x) + r(x)^{-1} v\]to achieve:
\[\dot{x} = A x + B v\]which is linear.
3.Limitation Example
\[\dot{x}_1 = a \sin x_2\] \[\dot{x}_2 = -x_1^2 + u\]We try to write it in the form:
\[\dot{x} = A x + B \gamma(x)\,[u - \alpha(x)]\]However the nonlinearity $a \sin x_2$ appears in $\dot{x}_1$ and is not multiplied by the input $u$.
Example 2 (matrix form)
\[\dot{x} = \begin{bmatrix} \dot{x}_1 \\ \dot{x}_2 \end{bmatrix} = \begin{bmatrix} a \sin x_2 \\ - x_1^2 \end{bmatrix} + \begin{bmatrix} 0 \\ 1 \end{bmatrix} u\]4.Solution: Coordinate Transformation
State transformation:
\[z_1 = x_1,\quad z_2 = a \sin x_2\]Then:
\[\dot{z}_1 = z_2\] \[\dot{z}_2 = a \cos x_2 \cdot (-x_1^2 + u)\]Input transformation - Choose:
\[u = x_1^2 + \frac{v}{a \cos x_2}\]Resulting linear system:
\[\dot{z}_1 = z_2\] \[\dot{z}_2 = v\]43. Formal Definition: Feedback Linearizable
A system
\[\dot{x} = f(x) + g(x) u\]where f(x) denotes nonlinearity, g(x)is linearity.
is feedback linearizable if there exist:
- A smooth control law: $u = \alpha(x) + \beta(x) v$
- A coordinate transformation: $z = T(x)$
such that:
\[\dot{z} = A z + b v\]for some constant matrices $A, b$.
Key questions:
- When is a system feedback linearizable (checking $f, g$ only)?
- What is the choice for $\alpha, \beta, T$?
Advantages and Defects:
- Advantages: all linear control techniques can be used; easy recipe
- Defects: requires knowing system dynamics $f, g$; may cancel stabilizing nonlinearity
44.Input-Output Linearization & Relative Degree
General SISO System
\[\dot{x} = f(x) + g(x) u\] \[y = h(x)\]previously we do
\[u = \alpha(x) + r(x)^{-1} v\]now if we make it simpler, instead of having all the state x linearized, we
We want output tracking: $y \to y_d$.
the Lie Derivatives
\[\dot{y} = L_f h(x)\] \[\ddot{y} = L_f^2 h(x) + L_g L_f h(x)\,u\]- Case 1: Relative Degree $r = 2$
If $L_g L_f h(x) \neq 0$, choose:
\[u = \frac{v - L_f^2 h(x)}{L_g L_f h(x)}\]then:
\[\ddot{y} = v\]- Case 2: Relative Degree $r = 3$
If $L_g L_f h(x) = 0$ and $L_g L_f^2 h(x) \neq 0$, then:
\[y^{(3)} = L_f^3 h(x) + L_g L_f^2 h(x)\,u\]Choose:
\[u = \frac{v - L_f^3 h(x)}{L_g L_f^2 h(x)}\]then:
\[y^{(3)} = v\]45. Zero Dynamics
\[\dot{x} = f(x) + g(x)u,\quad y = h(x)\]Differentiate $y$ until $u$ appears (after $r$ times):
\[y^{(r)} = L_f^r h(x) + L_g L_f^{r-1} h(x)\,u\]Choose $u$ to linearize the output channel ($\ddot y = v$):
\[u = \frac{v - L_f^r h(x)}{L_g L_f^{r-1} h(x)}\]Let the output state vector be:
\[z = \begin{bmatrix} y \\ \dot y \\ \vdots \\ y^{(r-1)} \end{bmatrix} \in \mathbb{R}^r\]Then:
\[\dot z = \begin{bmatrix} 0 & 1 & \cdots & 0 \\ \vdots & & \ddots & \vdots \\ 0 & 0 & \cdots & 1 \\ 0 & 0 & \cdots & 0 \end{bmatrix} z + \begin{bmatrix} 0 \\ \vdots \\ 0 \\ 1 \end{bmatrix} v\]Choose linear control $v = -Kz$ so that $\dot z = (A - BK)z$ is stable, giving $z(t) \to 0$, thus $y(t) \to 0$.
Zero dynamics: the full state space is $n$-dimensional. The output makes $y = \dot y = \cdots = y^{(r-1)} = 0$ which solves $r$ dimensions. The remaining $n - r$ dimensions are not controlled by $v$ — their evolution on the manifold ${z = 0}$ is the zero dynamics.
To find zero dynamics: set $z = 0$ (i.e. $y = \dot y = \cdots = 0$), substitute $u^* = \frac{-L_f^r h(x)}{L_g L_f^{r-1} h(x)}$, and solve for the remaining $n-r$ states.
- If zero dynamics are stable → full state converges → input-output linearization works
- If zero dynamics are unstable → internal states blow up even as $y \to 0$ → system is non-minimum phase
46. Minimum Phase / Stability
\[\dot{x}_z = f_z(x_z)\] \[\text{zero dynamics stable} \;\Rightarrow\; \text{minimum phase}\] \[\text{zero dynamics unstable} \;\Rightarrow\; \text{non-minimum phase}\]
if we use z for vector [y, y’, y’’, …, y^(n-1)], this $\mathcal{Z}$ is the plane where $y = \dot y = \cdots = y^{(r-1)} = 0$ ,with dim of n-r
Example: Zero Dynamics + Pole-Zero
System:
\[\dot{x}_1 = x_2\] \[\dot{x}_2 = \alpha x_3 + u\] \[\dot{x}_3 = \beta x_3 - u\] \[y = x_1\]Relative Degree
\[r = 2\]Zero Dynamics
On manifold:
\[y = x_1 = 0\] \[\dot{y} = x_2 = 0\] \[\ddot{y} = 0\]Solve for input:
\[\ddot{y} = \alpha x_3 + u = 0\] \[u^* = -\alpha x_3\]Substitute into internal state:
\[\dot{x}_3 = \beta x_3 - u^*\] \[= \beta x_3 + \alpha x_3\] \[= (\alpha + \beta)x_3\]Zero Dynamics
\[\dot{x}_3 = (\alpha + \beta)x_3\]Stability
\[\alpha + \beta < 0 \Rightarrow \text{stable}\] \[\alpha + \beta > 0 \Rightarrow \text{unstable}\]bonus Transfer Function
\[G(s) = \frac{s - (\alpha + \beta)}{s^2 (s - \beta)}\]❓: how to get this
Relative Degree
\[r = 2\] \[r = \#\text{poles} - \#\text{zeros}\]47. Conditions for Feedback Linearization
1.Introduction to Feedback Linearization
Consider a nonlinear system of the form:
\[\dot{x} = f(x) + g(x)u\]The goal of feedback linearization is to transform this nonlinear system into an equivalent linear system through a change of coordinates and a feedback law.
Let the new coordinates be $z = \Phi(x)$ and the new input be $v$. We want to find a transformation such that the system dynamics in the new coordinates are linear:
\[\dot{z} = Az + Bv\]If we can achieve this, we can use linear control techniques to control the system.
2.Differential Geometry Concepts
To understand feedback linearization, we need some concepts from differential geometry.
- Manifold: A space that is locally Euclidean. For our purposes, the state space of the system can often be considered a manifold.
- Vector Field: A function that assigns a tangent vector to each point on a manifold. In our system $\dot{x} = f(x)$, $f(x)$ is a vector field.
-
Lie Bracket: The Lie bracket of two vector fields $f$ and $g$, denoted as $[f, g]$, is another vector field defined as: \([f, g](x) = \frac{\partial g}{\partial x}f(x) - \frac{\partial f}{\partial x}g(x)\) The Lie bracket measures the non-commutativity of the flows of the vector fields. If $[f, g] = 0$, the vector fields are said to commute. (the vector fields are in a flat plane)
-
Adjoint: The adjoint operator is a way to represent repeated Lie brackets. \(\text{ad}_f g(x) = [f, g](x)\) \(\text{ad}_f^2 g(x) = [f, [f, g]](x)\) And in general: \(\text{ad}_f^k g(x) = [f, \text{ad}_f^{k-1} g(x)]\)
-
Distribution: A distribution $\Delta$ is a collection of vector subspaces of the tangent space at each point. For a set of vector fields ${g_1, \dots, g_m}$, the distribution is the span of these vector fields at each point $x$: \(\Delta(x) = \text{span}\{g_1(x), \dots, g_m(x)\}\)
- Involutive Distribution: A distribution $\Delta$ is involutive if for any two vector fields $X, Y \in \Delta$, their Lie bracket $[X, Y]$ is also in $\Delta$.
3.Frobenius’ Theorem
A solution $h(x)$ to the PDE exists if the distribution
\[\Delta = \{ g, \operatorname{ad}_f g, \dots, \operatorname{ad}_f^{n-1} g \}\]is involutive (Frobenius Theorem).
-
The core question When can we find a coordinate change $z = \Phi(x)$ that makes the system linear?
-
Lie bracket \([f,g](x) = \frac{\partial g}{\partial x}f(x) - \frac{\partial f}{\partial x}g(x)\)
Measures how much two flow directions fail to commute — zero means the flows are flat relative to each other.
- Distribution $\Delta$ \(\Delta = \text{span}\{g,\, \text{ad}_f g,\, \ldots,\, \text{ad}_f^{n-1} g\}\)
The set of all directions the system can be steered by input u— analogous to the controllability matrix.
- Involutivity $\Delta$ is involutive if $X, Y \in \Delta \Rightarrow [X,Y] \in \Delta$.
$\Delta$ doesn’t “twist” — it defines a consistent flat submanifold everywhere in state space.
48. feedback linearizable THM
A system is feedback linearizable if and only if:
- The matrix $\begin{bmatrix} g(x) & \text{ad}_f g(x) & \dots & \text{ad}_f^{n-1} g(x) \end{bmatrix}$ has rank $n$.
- The distribution $D = \text{span}[g, \text{ad}_f g, \dots, \text{ad}_f^{n-2} g]$ is involutive.
If these conditions hold, we can find a function $h(x)$ such that:
\[\frac{\partial h}{\partial x} \begin{bmatrix} g(x) & \text{ad}_f g(x) & \dots & \text{ad}_f^{n-2} g(x) \end{bmatrix} = 0\]The existence of such a solution $h(x)$ for the above Partial Differential Equation is guaranteed by Frobenius’ Theorem if the distribution $\Delta = {g, \dots, \text{ad}_f^{n-2} g}$ is involutive.
The PDE is: \(\frac{\partial h}{\partial x} \cdot g(x) = 0, \quad \frac{\partial h}{\partial x} \cdot \text{ad}_f g(x) = 0, \quad \ldots, \quad \frac{\partial h}{\partial x} \cdot \text{ad}_f^{n-2} g(x) = 0\)
Find a scalar $h(x)$ whose gradient is orthogonal to all vectors in $\Delta$ except the last one $\text{ad}_f^{n-1}g$. Once found, the full coordinate transformation is:
\[\Phi(x) = \begin{bmatrix} h(x) \\ L_f h(x) \\ \vdots \\ L_f^{n-1} h(x) \end{bmatrix}\]Involutivity of $\Delta$ (Frobenius) guarantees this PDE has a consistent solution.
intuition: The two conditions together guarantee that a valid coordinate transformation $z = \Phi(x)$ exists.
Together: rank $n$ gives enough directions, involutivity makes them geometrically compatible. Both are necessary — rank without involutivity gives no valid $\Phi$, involutivity without rank means $\Phi$ exists but doesn’t cover the full state space.
49. Proof of Feedback Linearizability
To show that a system is feedback linearizable, we need to prove that it has a relative degree of $n$.
Lemma: A system has relative degree $n$ if and only if there exists a function $h(x)$ such that:
\[L_g L_f^k h(x) = 0, \quad \forall k = 0, \dots, n-2\] \[L_g L_f^{n-1} h(x) \neq 0\]The existence of such a function $h(x)$ is guaranteed by Frobenius’ Theorem if the distribution $\Delta = \text{span}{g, \text{ad}_f g, \dots, \text{ad}_f^{n-2} g}$ is involutive.
Proof by Contradiction: Assume that $L_g h(x) = 0$. Then from the conditions for relative degree, we have:
\[\frac{\partial h}{\partial x} [g(x), \text{ad}_f g(x), \dots, \text{ad}_f^{n-1} g(x)] = [0, 0, \dots, L_g L_f^{n-1} h(x)]\]If the matrix $[g(x), \text{ad}_f g(x), \dots, \text{ad}_f^{n-1} g(x)]$ has full rank, and we need $\frac{\partial h}{\partial x} \neq 0$ for a valid transformation, then we cannot have all elements on the right be zero. This implies that $L_g L_f^{n-1} h(x)$ cannot be zero, which confirms that the relative degree is $n$.
50. Example of Feedback Linearization
Goal: find $z = \Phi(x)$ such that in $z$-coordinates, $\dot z = Az + Bv$ (linear).
Step 1: Check controllability
\[\Delta = \text{span}\{g,\, \text{ad}_f g,\, \ldots,\, \text{ad}_f^{n-1} g\}\]Must have rank $n$ — otherwise some directions are unreachable.
Step 2: Check involutivity
$\Delta$ must be involutive: $X, Y \in \Delta \Rightarrow [X,Y] \in \Delta$.
This guarantees the PDE for $h(x)$ has a solution (Frobenius theorem).
Step 3: Solve for $h(x)$
Find scalar $h(x)$ such that: \(L_g h = 0,\quad L_g L_f h = 0,\quad \ldots,\quad L_g L_f^{n-2} h = 0, \quad L_g L_f^{n-1} h \neq 0\)
$h(x)$ is the first coordinate of $z$ — everything else follows from it.
Step 4: Build $\Phi(x)$
\[z = \Phi(x) = \begin{bmatrix} h(x) \\ L_f h(x) \\ \vdots \\ L_f^{n-1} h(x) \end{bmatrix}\]Because $\dot z_i = z_{i+1}$ must hold, each coordinate is just the time derivative of the previous one.
Step 5: Design $u$
\[u = \frac{v - L_f^n h(x)}{L_g L_f^{n-1} h(x)}\]This cancels all nonlinearities, giving $z^{(n)} = v$.
Step 6: Linear control
\[v = -Kz \implies \dot z = (A - BK)z\]Choose $K$ for desired eigenvalues.
Consider the system:
\[\dot{x} = \begin{bmatrix} a\sin(x_2) \\ -x_1^2 \end{bmatrix} + \begin{bmatrix} 0 \\ 1 \end{bmatrix} u\]Here, $f(x) = \begin{bmatrix} a\sin(x_2) \ -x_1^2 \end{bmatrix}$ and $g(x) = \begin{bmatrix} 0 \ 1 \end{bmatrix}$.
Step 1: First, we check if the system is feedback linearizable. We compute the Lie bracket $[f, g]$:
\[[f, g] = \frac{\partial g}{\partial x}f - \frac{\partial f}{\partial x}g = 0 - \begin{bmatrix} 0 & a\cos(x_2) \\ -2x_1 & 0 \end{bmatrix} \begin{bmatrix} 0 \\ 1 \end{bmatrix} = \begin{bmatrix} -a\cos(x_2) \\ 0 \end{bmatrix}\]The controllability matrix is:
\[\begin{bmatrix} g & [f,g] \end{bmatrix} = \begin{bmatrix} 0 & -a\cos(x_2) \\ 1 & 0 \end{bmatrix}\]This matrix has rank 2 for all $x$ where $a\cos(x_2) \neq 0$.
Step 2: The distribution $\Delta = \text{span}{g}$ is involutive because for any scalar functions $\alpha(x), \beta(x)$, the Lie bracket $[\alpha g, \beta g]$ is in $\Delta$.
Step 3: Now we need to find $h(x)$ such that $L_g h(x) = 0$.
\[L_g h(x) = \nabla h \cdot g = \frac{\partial h}{\partial x_1} (0) + \frac{\partial h}{\partial x_2} (1) = \frac{\partial h}{\partial x_2} = 0\]This implies that $h(x)$ is a function of $x_1$ only. Let’s choose $h(x) = x_1$.
Now we check the second condition:
\[L_g L_f h(x) = L_g ( \nabla h \cdot f) = L_g (a \ sin(x_2)) = \nabla(a \ sin(x_2)) \cdot g = \begin{bmatrix} 0 & a\cos(x_2) \end{bmatrix} \begin{bmatrix} 0 \\ 1 \end{bmatrix} = a\cos(x_2)\]Since $L_g L_f h(x) \neq 0$ (in general), the system has relative degree 2 and is feedback linearizable.
Step 4: Build $\Phi(x)$
\[z = \Phi(x) = \begin{bmatrix} h(x) \\ L_f h(x) \end{bmatrix} = \begin{bmatrix} x_1 \\ a\sin(x_2) \end{bmatrix}\]Step 5: Design $u$
Compute $L_f^2 h(x)$:
\[L_f^2 h = L_f(a\sin(x_2)) = \nabla(a\sin(x_2)) \cdot f = \begin{bmatrix} 0 & a\cos(x_2) \end{bmatrix} \begin{bmatrix} a\sin(x_2) \\ -x_1^2 \end{bmatrix} = -a x_1^2 \cos(x_2)\]So:
\[u = \frac{v - L_f^2 h}{L_g L_f h} = \frac{v + ax_1^2\cos(x_2)}{a\cos(x_2)}\]Step 6: Linear control
In $z$-coordinates the system is $\ddot z_1 = v$. Choose:
\[v = -k_1 z_1 - k_2 z_2 = -k_1 x_1 - k_2 a\sin(x_2)\]giving closed-loop characteristic polynomial $s^2 + k_2 s + k_1$. Choose $k_1, k_2 > 0$ for stability.
51. MIMO Systems FB Lin
For Multi-Input Multi-Output (MIMO) systems, we consider a square system with $m$ inputs and $m$ outputs.
Q: why should it must in m*m?
\[\dot{x} = f(x) + \sum_{j=1}^{m} g_j(x) u_j = f(x) + G(x)u\] \[y_i = h_i(x), \quad i=1, \dots, m\]because this way we could solve the inverse of decouple matrix A. This makes it like the SISO I/O Lin.
where $G(x) = [g_1(x), \dots, g_m(x)]$.
1.Vector Relative Degree
A MIMO system has a vector relative degree ${r_1, \dots, r_m}$ if:
- $L_{g_j} L_f^k h_i(x) = 0$ for all $j=1, \dots, m$, for all $k < r_i - 1$, and for all $x$ in a neighborhood of $x_0$.
-
The $m \times m$ decoupling matrix \(A(x) = \begin{bmatrix} L_{g_1}L_f^{r_1-1}h_1(x) & \dots & L_{g_m}L_f^{r_1-1}h_1(x) \\ \vdots & \ddots & \vdots \\ L_{g_1}L_f^{r_m-1}h_m(x) & \dots & L_{g_m}L_f^{r_m-1}h_m(x) \end{bmatrix}\) is nonsingular at $x=x_0$.
basically is taking the derivative of output $h_i$ exactly $r_i$ times.
If these conditions are met, we can define an input-output linearizing feedback law. The $i$-th output derivative is:
\[y_i^{(r_i)} = L_f^{r_i} h_i(x) + \sum_{j=1}^{m} L_{g_j} L_f^{r_i-1} h_i(x) u_j\]In matrix form:
\[\begin{bmatrix} y_1^{(r_1)} \\ \vdots \\ y_m^{(r_m)} \end{bmatrix} = \begin{bmatrix} L_f^{r_1}h_1(x) \\ \vdots \\ L_f^{r_m}h_m(x) \end{bmatrix} + A(x) \begin{bmatrix} u_1 \\ \vdots \\ u_m \end{bmatrix}\]By choosing $u = A(x)^{-1}(-b(x)+v)$, where $b(x)$ is the vector of $L_f^{r_i}h_i(x)$ terms, we can achieve $y_i^{(r_i)} = v_i$.
the reason why we need decoupling matrix to be full rank:
- because that would mean our u (input) can control all m states. if it is not full rank, then, some rows are uncontrollable, thus making system failed
52. Final: State \ input \ output
\[\dot x = f(x, u), \qquad y = h(x)\]Goal of control theory: use $u$ to drive $x$ as desired, using available $y$.
| Method | What it does |
|---|---|
| Feedback linearization | use input to cancels nonlinearities in $\dot x = f(x)+g(x)u$ exactly. Requires full state + accurate model. |
| Input-output linearization | Differentiates OUTPUT $y=h(x)$ until input $u$ appears, cancels nonlinearities in the $y$-to-$u$ channel. state that are not cover(Zero dynamics) may be unstable. |
| Backstepping | Recursively stabilizes each state using virtual inputs, designs real $u$ at the last step. |
| Sliding mode | using input u which relate to sliding surface to Forces state onto surface $s=0$, then slides to origin. Robust to model uncertainty. |
Feedback lin. vs Input-output lin.: Both cancel nonlinearities, but feedback linearization linearizes the full state dynamics while input-output linearization only linearizes the output response — leaving internal dynamics potentially unstable.