Warner Wu 吴秉寰

Undergraduate Student at
University of California, Berkeley
Tongji University, Shanghai
- the phase plane was describe in $x-\dot{x}$ plot. and the nonlinear system was described in $\dot{x}=f(x)$. Phase plane could looks like this
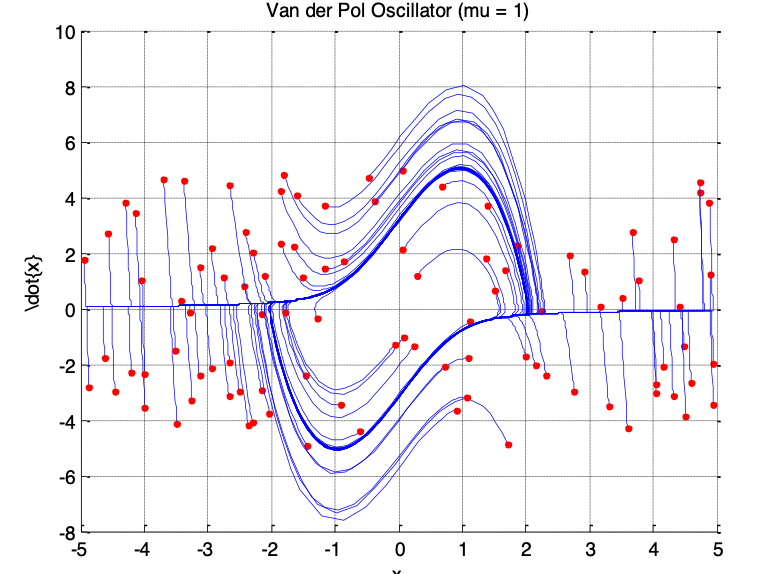
This is telling us that this is not a function of $x-\dot{x}$. one x value signifies possibly two $\dot{x}$ (which actually IS) this is probably because the non-linearity make the same x could lead to different $\dot{x}$ such as $x^2$ (in which case the plot would be a sphere)
-
Banach Fixed points theorem is a sufficient condition. which means, this is a stronger condition to have a fixed point, but not nessesarily so. try draw some plot and you would find: contraction mappings always have fixed point, some contraction plus expansion also does, but if you plot it all above $y=x$ then this is too much expanding. That case no fixed point after iteration
-
locally lipschitz definition: requires ALL points to be Locally lipschitz. SO local here means the region to be consider within the slope of L is locally, not saying “some points satisfied locally lipschitz = local lipschitz”
-
The so-called up north equation was actually trying to construct a coefficient P who is pos def and also whose derivative is neg def. here is why
so the lyapunov equation would be
\[A^T P + PA = -\alpha I\]- the understanding of the rank for the matrix, and singularity vs. nonsingularity: